Abstract
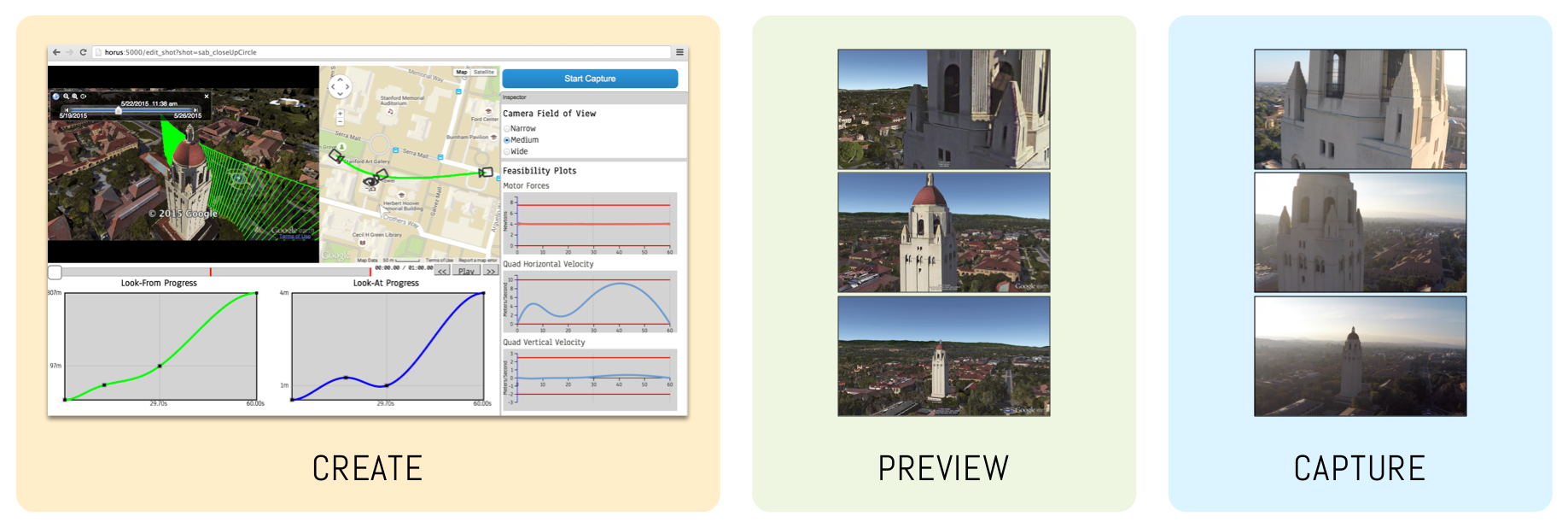
Cameras attached to small quadrotor aircraft are rapidly becoming a ubiquitous tool for cinematographers, enabling dynamic camera movements through 3D environments. Currently, professionals use these cameras by flying quadrotors manually, a process which requires much skill and dexterity. In this paper, we investigate the needs of quadrotor cinematographers, and build a tool to support video capture using quadrotor-based camera systems. We begin by conducting semi-structured interviews with professional photographers and videographers, from which we extract a set of design principles. We present a tool based on these principles for designing and autonomously executing quadrotor-based camera shots. Our tool enables users to: (1) specify shots visually using keyframes; (2) preview the resulting shots in a virtual environment; (3) precisely control the timing of shots using easing curves; and (4) capture the resulting shots in the real world with a single button click using commercially available quadrotors. We evaluate our tool in a user study with novice and expert cinematographers. We show that our tool makes it possible for novices and experts to design compelling and challenging shots, and capture them fully autonomously.